LinMot Drives include a complete range of servo drives that are fast, flexible, feature-rich, and easy to integrate into any application. Our drives are designed to provide precise control, optimum force/torque, and a rich set of features to complement our wide range of linear motors, integrated modules, and linear rotary motors. At the same time, it is vital that these servo drives are easy to use and operate reliably – saving you time and money.
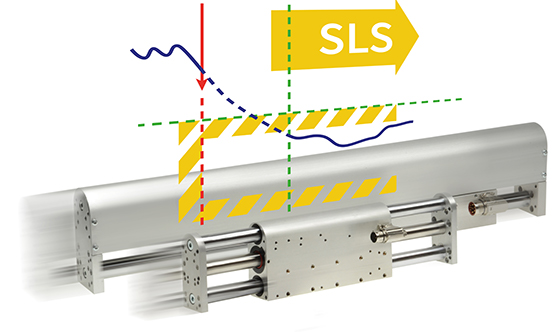
Safety & Reliability
Simplicity

LinMot integrates the appropriate safety functions and several new additional functions directly into the drive and motor, taking care to ensure that they are identical in design to existing products.
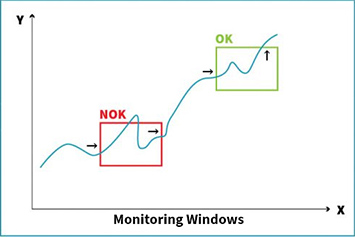
LinMot drives are characterised by their very fast cycle time and can therefore record individual measuring points with the highest possible sampling rate. This gives the user a detailed process picture and, based on this data, he can decide whether the process is successful or not.
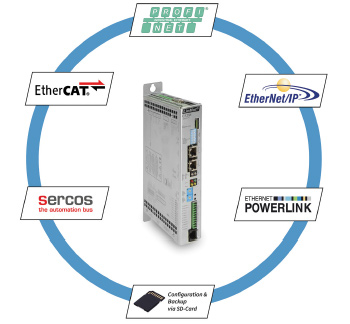
Connection to an upper-level controller can be made via analog, digital, or serial interfaces, fieldbuses, or ETHERNET. The wide range of fieldbus interfaces and protocols makes LinMot servo drives easy to integrate with any controller, whether a PLC, and industrial PC, or a proprietary controller.
We will be happy to answer your questions or provide you with advice.





You are currently viewing a placeholder content from Yumpu. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More Information
