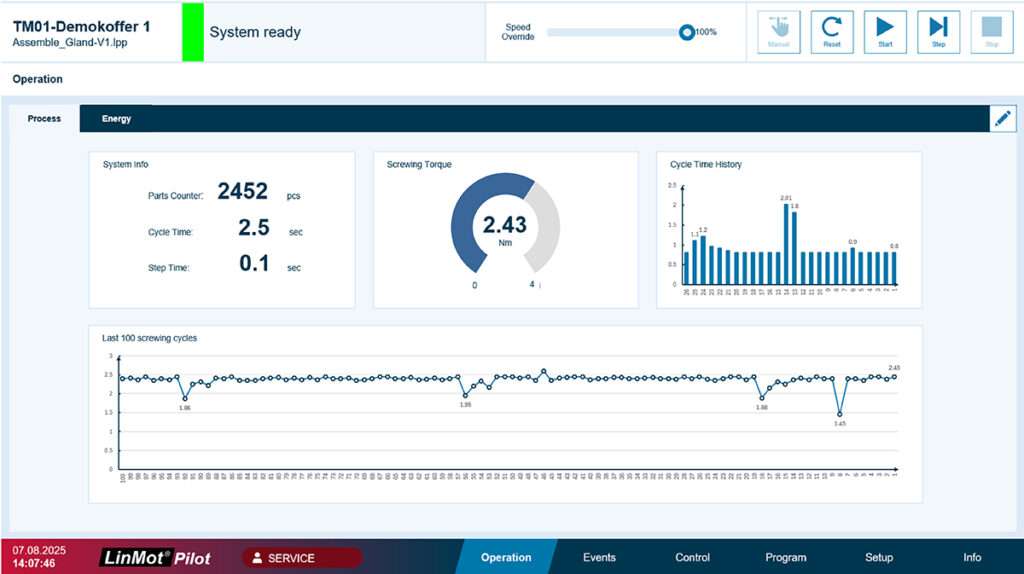
LinMot Pilot ist eine intuitive No-Code-Robotersteuerung für mehrachsige LinMot Systeme, für die keine SPS oder Programmierkenntnisse erforderlich sind.

Zukünftig mit Know-How-basierten Applikationen erweiterbar:

![]()
![]()
![]()
Mit zusätzlichem Gateway auch kompatibel mit
![]()
![]()
![]()


Freuen Sie sich auf inspirierende Erfolgsgeschichten, spannende Einblicke in unsere Innovationen und überraschende Fakten über unsere Antriebe – eine wahre Freude für alle, die sich für Automatisierung begeistern.
Maschinenbauer und Hersteller suchen zunehmend nach dynamischen und dennoch platzsparenden Antriebslösungen. Werfen Sie einen Blick auf unseren neuen Anwendungsbericht und erfahren Sie, wie LinMot Ihnen dabei helfen kann!
Sie sehen gerade einen Platzhalterinhalt von Vimeo. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von Instagram. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von Google Maps. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von Google Maps. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr Informationen