Si l’on veut obtenir des temps de cycle rapides lorsque les entraînements directs sont installés verticalement ou si l’on veut empêcher la chute d’un axe en cas de panne de courant, il faut compenser le poids mort. Jusqu’à présent, ce sont surtout des ressorts mécaniques ou des systèmes pneumatiques qui ont été utilisés ici, mais ils présentent certains inconvénients. Un « ressort magnétique » de MagSpring est donc la meilleure solution dans de nombreux cas. Le grand avantage du MagSpring est d’être un composant passif, il ne nécessite pas de connexion électrique, ne nécessite pas d’entretien et fournit une force constante sur toute la plage de travail.
Des problèmes surviennent régulièrement sur les machines-outils et autres machines équipées de systèmes de compensation à ressort ou pneumatiques sur des axes verticaux, comme le montrent également les commentaires correspondants dans les forums Internet. Les personnes concernées signalent que leurs axes tombent soudainement et causent des dommages considérables aux outils et aux machines. Les causes mentionnées dans les posts sont les axes mal contrôlés, les pannes de courant et les problèmes du système de contrepoids dus à des ressorts cassés ou à des fuites. Toutefois, les différents systèmes de contrepoids ne se distinguent pas seulement par leur fiabilité, et il est donc utile de les examiner de prêt:
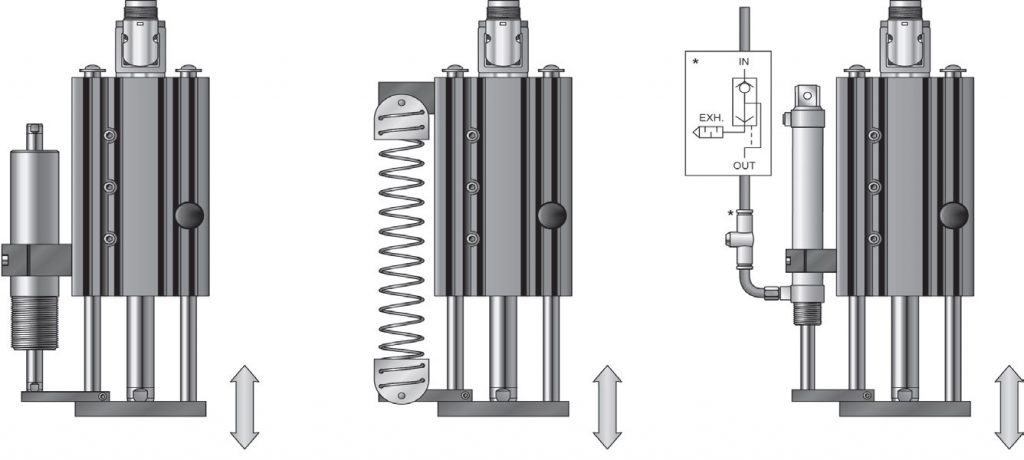
La compensation du poids est indispensable pour un gain énergétique lorsque le mouvement est dynamique et que le moteur est utilisé en position verticale (de gauche à droite : ressort mécanique, système pneumatique, MagSpring) (Graphique : M. Furler)
Domaines d’application
Si des moteurs linéaires ou des servomoteurs électriques sont utilisés pour effectuer des mouvements verticaux, ils doivent appliquer une force constante pendant le mouvement et à l’arrêt afin de contrebalancer la force du poids. Si cette masse est équilibrée par un système approprié, la consommation d’énergie de l’entraînement électrique est réduite. En règle générale, le variateur peut être de calibre plus petit, ce qui par conséquent réduit la puissance de l’alimentation. En outre, un système de compensation a pour effet que le démarrage et le freinage de la masse mobile (par exemple, les poids des parties de l’axe Z d’une machine-outil qui se déplacent vers le haut et vers le bas, y compris le porte-outil et l’outil) peuvent être effectués plus en douceur, les roulements sont moins sollicités, aucune condition de charge asymétrique ne se produit lorsque l’axe se déplace vers le haut et vers le bas et, enfin et surtout, les mouvements peuvent être conçus de manière plus dynamique. Dans de nombreux cas, les systèmes de compensation sont également utilisés pour prévenir efficacement les situations dangereuses pour la pièce, la machine et l’opérateur causées par la chute soudaine des axes. Actuellement, l’un des quatre principes suivants est utilisé pour mettre en œuvre la compensation, en fonction de l’application:
Contrepoids
Sur les grandes machines-outils, on utilise souvent des contrepoids pour équilibrer le poids de la machine. Ces contrepoids sont reliés aux pièces de la machine à déplacer par des chaînes à rouleaux ou des câbles. Cependant, compte tenu des conceptions de plus en plus compactes, il n’y a souvent pas assez de place pour les contrepoids et les guides. En outre, le système est sensible à l’usure mécanique et nécessite donc une maintenance importante. Si le poids à équilibrer change, une conversion est également nécessaire. Cette méthode est totalement inadaptée aux applications dynamiques, car l’inertie est massivement augmentée par la double dimension du mouvement.
Ressort mécanique
Le ressort mécanique est un élément de conception très peu coûteux pour réaliser la compensation du poids dans une position d’installation verticale. Cependant, l’augmentation linéaire de la force dans la plage de travail du ressort ne permet pas une compensation idéale de la gravité dans toute la plage de course. En outre, les ressorts mécaniques sont soumis à une usure relativement importante. Certains assemblages de ressorts alternatifs permettent de générer une force constante sur une plus grande plage de travail, et ils minimisent également les dommages consécutifs à la rupture d’un ressort, mais ils sont plus chers et nécessitent beaucoup d’espace. Si le poids à équilibrer change, cette approche nécessite également des modifications.
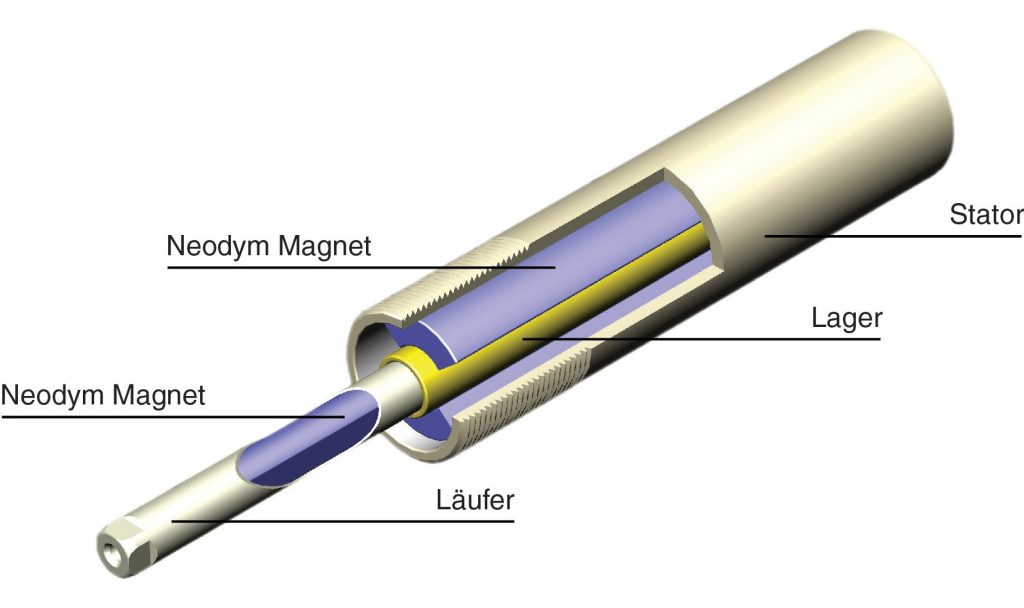
Structure du ressort magnétique MagSpring de LinMot (Rendu : LinMot)
Compensation pneumatique
Contrairement aux ressorts mécaniques, un vérin pneumatique permet d’obtenir des forces constantes et relativement élevées sur une grande plage de course. Cela signifie que les vérins pneumatiques sont en principe bien adaptés à la compensation du poids. Si une vanne de régulation est connectée en amont, la force peut également être réglée en continu et ainsi réagir aux variations de la force du poids. Cependant, cela nécessite une unité de commande supplémentaire.
L’air comprimé étant l’une des « sources d’énergie » les plus coûteuses dans une production, les coûts énergétiques des systèmes de compensation pneumatiques ont un impact significatif et détériorent la rentabilité. Les systèmes d’air comprimé sont également sujets à des fuites, de sorte que les fuites peuvent entraîner une chute inattendue de l’axe vertical. Les systèmes d’air comprimé demandent également beaucoup d’entretien et ne peuvent être utilisés que lorsqu’un raccordement correspondant est disponible ou qu’ils limitent la mobilité des machines et des systèmes.
Ressort magnétique
Le « ressort magnétique » MagSpring développé par le spécialiste des moteurs linéaires LinMot, quant à lui, utilise la répulsion magnétique pour générer la force et est donc sans entretien et particulièrement fiable. Grâce à une conception spéciale des composants porteurs de flux ainsi que des aimants, les corrélations clairement non linéaires entre la force et le déplacement des arrangements aimant-fer sont converties en une courbe de force constante. Selon la classe de résistance du MagSpring, les aimants permanents se trouvent soit dans le stator (fer, nickelé), soit dans le rotor, soit dans les deux composants (Fig. 2). Le palier du rotor en acier au chrome-nickel (1.4301) est pourvu d’un guide coulissant intégré, de sorte que les ressorts magnétiques de LinMot peuvent être utilisés de manière constructive comme les ressorts à gaz, mais offrent une durée de vie beaucoup plus longue. Comme les MagSprings sont des composants passifs, ils ne nécessitent pas d’alimentation en énergie et peuvent donc être utilisés sans problème dans des applications de sécurité. En raison de la génération de force indépendante de la trajectoire, les ressorts MagSpring ne sont pas seulement parfaitement adaptés à la compensation des forces de poids dans les dispositifs d’entraînement verticaux. Grâce à la caractéristique force-déplacement constante, les ressorts magnétiques peuvent être utilisés dans une variété d’autres applications, telles que la génération indépendante de la position d’une force de contact constante, l’application d’une force de maintien constante sur une grande plage de course ou le soutien unilatéral de la force dans les tâches d’entraînement. En tant qu’élément passif, les ressorts MagSpring peuvent également être utilisés pour maintenir ou déplacer des axes de machines ou d’autres composants tels que des pinces ou des curseurs dans une position définie à l’état non activé.

La famille des ressorts magnétiques MagSpring comprend actuellement plus de 30 variantes (photo: LinMot).
Plage de fonctionnement du ressort magnétique
À l’état détendu, le curseur est situé approximativement au centre du stator, l’extrémité du curseur, appelée extrémité de travail, dépassant légèrement du stator. En principe, cependant, les deux extrémités de la glissière peuvent être utilisées pour la fixation de la charge. À partir de cette position de repos, le rotor peut être tiré ou poussé hors du stator dans les deux sens. Ce faisant, la force s’accumule de zéro à la valeur nominale sur une courte distance. Ensuite, la course de travail commence avec la force constante. La position de départ décrit la distance entre l’extrémité de travail du curseur et l’extrémité du stator au début de la plage de force constante. LinMot propose deux séries de MagSpring pour la gamme de force de 11 à 22 N et une course jusqu’à 290 mm ou de 40 à 60 N et une course jusqu’à 275 mm en tant qu’articles de catalogue (Fig. 3). Une version encore plus puissante, pouvant atteindre une force nominale de 120 N, est en cours de développement et sera disponible à partir de 2014. En raison des tolérances de matériau et de fabrication, la force effective est de l’ordre de +/- 5 % de la force nominale. Des brides de montage et des adaptateurs sont disponibles pour le montage des ressorts magnétiques. Avec ces accessoires, les MagSprings peuvent être fixés directement sur le guide linéaire H01 ou le guide à pont B01 de la société. Grâce à un petit diamètre de seulement 20 ou 37 mm, les ressorts magnétiques peuvent également être utilisés dans des espaces confinés.
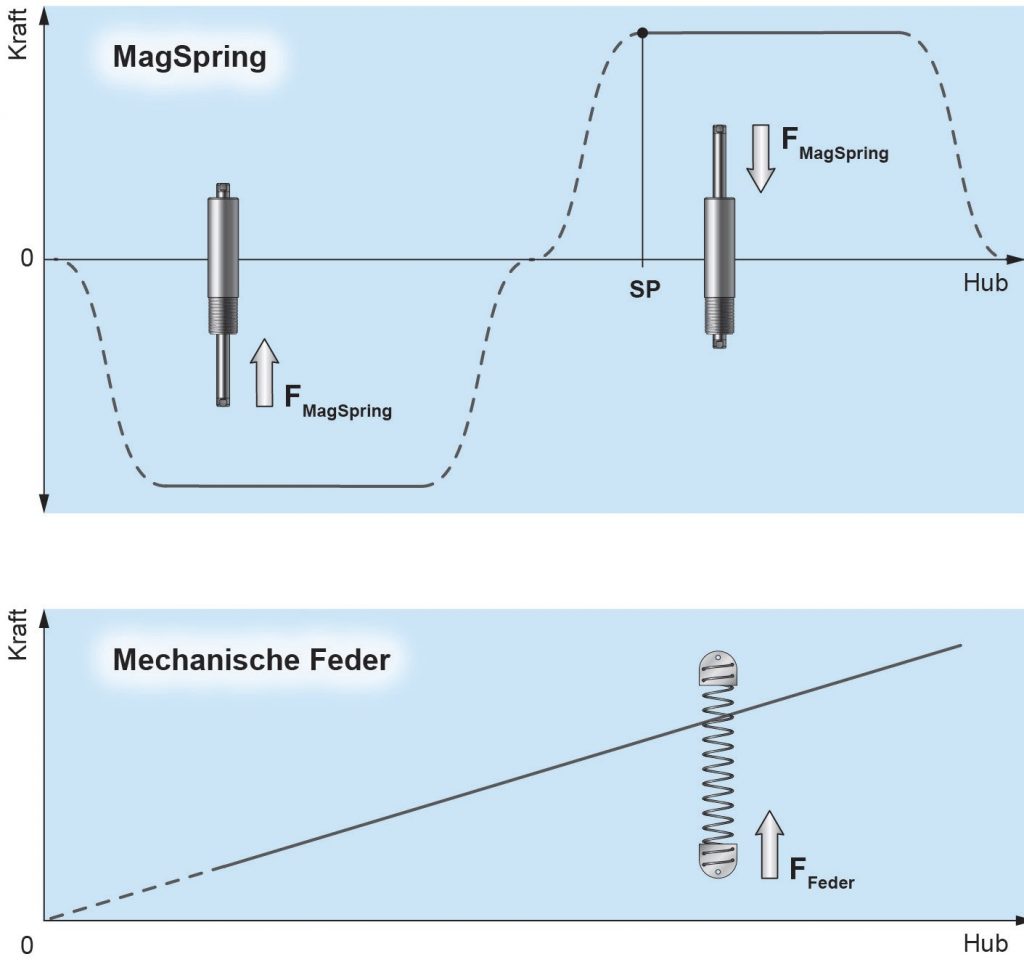
Contrairement à un ressort mécanique, le MagSpring offre une force constante sur toute la plage de la course de travail (SP = point de départ) (Graphique : LinMot)
Conclusion
Avec un MagSpring, la force du poids sur un axe disposé verticalement et entraîné par un servomoteur ou un moteur linéaire peut être compensée de manière passive. Le ressort magnétique génère une force constante sur toute la plage de course, indépendamment de la position, de la vitesse ou de la position de montage. Le moteur ne doit appliquer que les forces dynamiques et peut donc agir plus rapidement et être plus petit. Si la force du MagSpring est choisie pour être supérieure à la force du poids de la masse de la charge, la charge peut être amenée dans une position sûre en cas de coupure de courant. Les ressorts MagSpring ne nécessitent aucun entretien, sont insensibles à l’usure et prennent très peu de place. Grâce à ses propriétés presque idéales, le ressort magnétique est donc supérieur aux autres systèmes de contrepoids (contrepoids, ressort mécanique et contrepoids pneumatique) dans de nombreuses applications.





Vous êtes actuellement en train de consulter le contenu d'un espace réservé de Yumpu. Pour accéder au contenu réel, cliquez sur le bouton ci-dessous. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informations
