L’ampia selezione di servoazionamenti LinMot convince per la sua velocità, l’alta flessibilità e la vasta gamma di funzioni. Inoltre, possono essere facilmente integrati in qualsiasi tipo di applicazione. I nostri azionamenti sono progettati per un controllo preciso, un rapporto forza/coppia ottimale e una vasta gamma di funzioni. Si tratta di un complemento ideale alla nostra vasta gamma di motori lineari, moduli lineari integrati e attuatori lineari. Un altro fattore decisivo è che i nostri servoazionamenti sono facili da usare e lavorano in modo affidabile – risparmiando tempo e denaro.
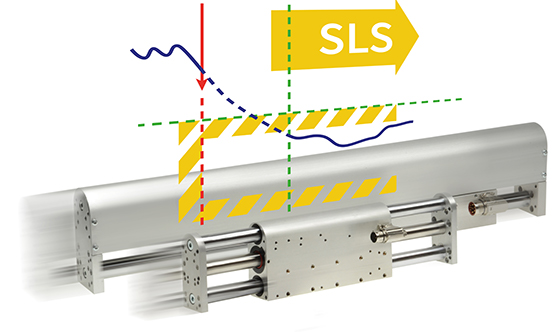
Sicuro e affidabile
User-friendly

LinMot integra direttamente nei propri azionamenti e nei motori le funzioni di sicurezza funzionale, oltre ad alcune nuove funzioni aggiuntive, avendo cura di garantire che siano identici nel design ai prodotti esistenti.
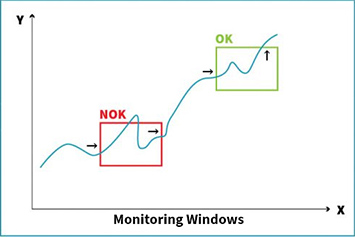
Gli azionamenti LinMot sono caratterizzati da un tempo di ciclo molto veloce e possono quindi registrare singoli punti di misurazione con la massima frequenza di campionamento possibile. Questo dà all’utente un quadro dettagliato del processo e, sulla base di questi dati, può decidere se il processo è riuscito o no.
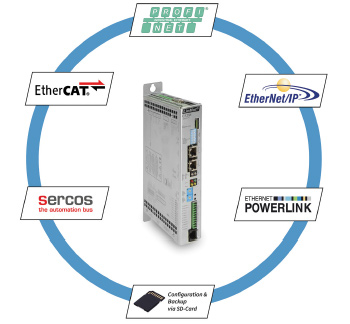
Il collegamento a un dispositivo di controllo di livello superiore può essere effettuato con interfacce digitali, analogiche o seriali, con bus di campo o con la rete ETHERNET. La vasta gamma delle interfacce per bus di campo e i tanti protocolli rendono i dispositivi LinMot facilmente integrabili con qualsiasi apparecchiatura di controllo (PLC, computer industriale, dispositivo di controllo di livello superiore).
Saremo lieti di rispondere alle vostre domande o di darvi consigli.





